Find The Domain Of The Vector Function
Muz Play
Mar 24, 2025 · 6 min read
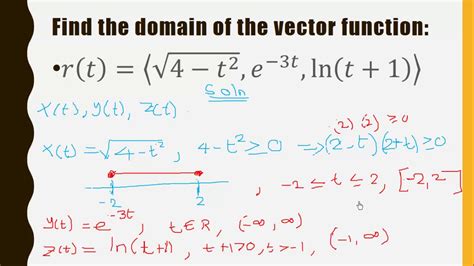
Table of Contents
Finding the Domain of a Vector Function: A Comprehensive Guide
Determining the domain of a vector function is crucial for understanding its behavior and applying it effectively in various mathematical contexts. While similar in principle to finding the domain of a scalar function, the multi-dimensional nature of vector functions introduces some unique considerations. This comprehensive guide will delve into the intricacies of identifying the domain of a vector function, providing clear explanations, practical examples, and insightful tips for mastering this important concept.
Understanding Vector Functions
Before diving into domain determination, let's establish a firm understanding of what a vector function is. A vector function, often denoted as r(t) or f(t), assigns a vector to each value of an independent variable, typically 't'. This variable often represents time, but it can be any real number. The vector itself is usually expressed in terms of its components, which are typically scalar functions of 't'. For example, a three-dimensional vector function can be represented as:
r(t) = <f(t), g(t), h(t)>
where f(t), g(t), and h(t) are scalar functions defining the x, y, and z components of the vector, respectively.
Defining the Domain
The domain of a vector function is the set of all possible values of the independent variable 't' for which the vector function is defined. This means that each of the component functions, f(t), g(t), and h(t), must be defined for the given value of 't'. Any value of 't' that causes even one of the component functions to be undefined will result in the vector function being undefined for that value.
Key Considerations:
- Individual Component Functions: The domain of the vector function is the intersection of the domains of its component functions. This is because the entire vector must be defined for a given 't'; if one component is undefined, the entire vector is undefined.
- Square Roots: Avoid taking the square root of a negative number. The argument inside the square root must be greater than or equal to zero.
- Fractions: Avoid division by zero. The denominator of any fraction must be non-zero.
- Logarithms: Avoid taking the logarithm of zero or a negative number. The argument of a logarithm must be strictly positive.
- Trigonometric Functions: While trigonometric functions like sine and cosine are defined for all real numbers, functions like tangent and cotangent have restrictions due to division by zero.
- Other Functions: The domain is limited by any restrictions inherent to the specific functions used in the component functions of the vector.
Step-by-Step Process for Finding the Domain
Here's a systematic approach to determine the domain of a vector function:
-
Identify the Component Functions: First, separate the vector function into its individual component scalar functions.
-
Find the Domain of Each Component Function: Determine the domain of each component function separately, considering the restrictions mentioned above (square roots, fractions, logarithms, etc.).
-
Determine the Intersection: The domain of the vector function is the intersection of the domains of all its component functions. This is the set of values of 't' for which all component functions are defined.
-
Express the Domain in Interval Notation: Finally, represent the domain using interval notation, which concisely describes the set of values. This notation uses parentheses ( ) for open intervals (excluding endpoints) and square brackets [ ] for closed intervals (including endpoints). For example, (a, b) represents all values between a and b, excluding a and b, while [a, b] represents all values between a and b, including a and b. Union notation (∪) can be used to combine disjoint intervals.
Examples
Let's illustrate this process with some examples:
Example 1:
Find the domain of the vector function r(t) = <√(t+1), ln(t), 1/(t-2)>
-
Component Functions: f(t) = √(t+1), g(t) = ln(t), h(t) = 1/(t-2)
-
Individual Domains:
- f(t): t + 1 ≥ 0 => t ≥ -1. Domain: [-1, ∞)
- g(t): t > 0. Domain: (0, ∞)
- h(t): t ≠ 2. Domain: (-∞, 2) ∪ (2, ∞)
-
Intersection: The intersection of [-1, ∞), (0, ∞), and (-∞, 2) ∪ (2, ∞) is (0, 2) ∪ (2, ∞).
-
Interval Notation: The domain of r(t) is (0, 2) ∪ (2, ∞).
Example 2:
Find the domain of the vector function r(t) = <sin(t), cos(t), tan(t)>
-
Component Functions: f(t) = sin(t), g(t) = cos(t), h(t) = tan(t)
-
Individual Domains:
- f(t): (-∞, ∞)
- g(t): (-∞, ∞)
- h(t): t ≠ (π/2) + nπ, where n is an integer.
-
Intersection: The intersection of (-∞, ∞), (-∞, ∞), and all real numbers except odd multiples of π/2 is all real numbers except odd multiples of π/2.
-
Interval Notation: The domain is difficult to express concisely in interval notation due to the infinite number of excluded points. It's best described as ℝ \ { (π/2) + nπ | n ∈ ℤ } where ℤ represents the set of integers.
Example 3:
Find the domain of r(t) = <t², e^t, 1/(t²-4)>
-
Component Functions: f(t) = t², g(t) = e^t, h(t) = 1/(t²-4)
-
Individual Domains:
- f(t): (-∞, ∞)
- g(t): (-∞, ∞)
- h(t): t² ≠ 4 => t ≠ ±2. Domain: (-∞, -2) ∪ (-2, 2) ∪ (2, ∞)
-
Intersection: The intersection of (-∞, ∞), (-∞, ∞), and (-∞, -2) ∪ (-2, 2) ∪ (2, ∞) is (-∞, -2) ∪ (-2, 2) ∪ (2, ∞).
-
Interval Notation: The domain of r(t) is (-∞, -2) ∪ (-2, 2) ∪ (2, ∞).
Advanced Considerations and Applications
Understanding the domain is crucial for several advanced applications involving vector functions:
- Calculus of Vector Functions: Operations like differentiation and integration of vector functions are only valid within the domain of the function. Attempting to differentiate or integrate outside the domain leads to undefined results.
- Curve Sketching and Parameterization: The domain of a vector function directly impacts the shape and extent of the curve it represents in space. The domain defines the range of parameter values that trace out the curve.
- Physics and Engineering: In applications like projectile motion or robotic arm trajectory, the domain of the vector function representing the position of an object signifies the valid time interval for the model's applicability.
- Computer Graphics: Vector functions are fundamental in computer graphics for creating curves and surfaces. The domain controls the portion of the curve or surface that is generated.
Conclusion
Finding the domain of a vector function is a critical step in working with these functions effectively. By carefully analyzing the component functions and identifying potential restrictions, one can accurately determine the set of valid input values. This understanding is crucial not only for mathematical accuracy but also for correct interpretations and applications across various fields. Remember to always check for square roots of negative numbers, division by zero, logarithms of non-positive numbers, and any other restrictions inherent in the component functions. By following the steps outlined in this guide, you can confidently and accurately determine the domain of any vector function you encounter.
Latest Posts
Latest Posts
-
As A Balloon Is Inflated What Happens To The Pressure
Mar 30, 2025
-
How To Find The Heat Capacity Of A Calorimeter
Mar 30, 2025
-
Define The Simplest Form Of A Rate
Mar 30, 2025
-
How To Add Radicals With Different Radicands
Mar 30, 2025
-
The Ground State In An Atom Is
Mar 30, 2025
Related Post
Thank you for visiting our website which covers about Find The Domain Of The Vector Function . We hope the information provided has been useful to you. Feel free to contact us if you have any questions or need further assistance. See you next time and don't miss to bookmark.
